Introduction to Self-Driving Cars
Recently, I have successfully finished “Introduction to Self-Driving Cars” course! This is a first course of the Self-Drivig cars specialiation offered by Toronto University.

In this course I have successfully:
- Understood commonly used hardware used for self-driving cars
- Identified the main components of the self-driving software stack
- Programmed vehicle modelling and control
- Analyzed the safety frameworks and current industry practices for vehicle development
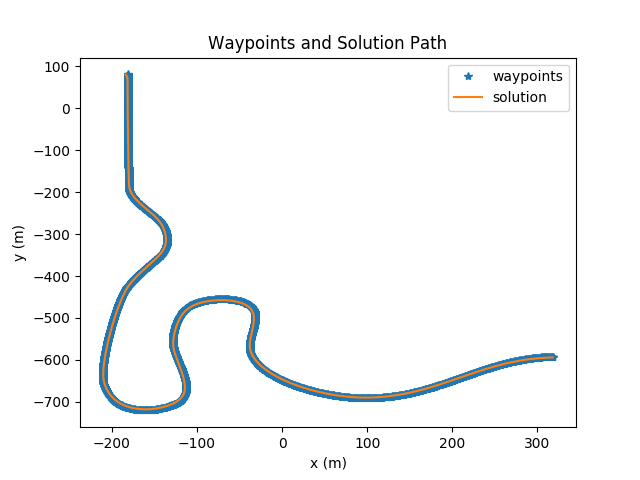
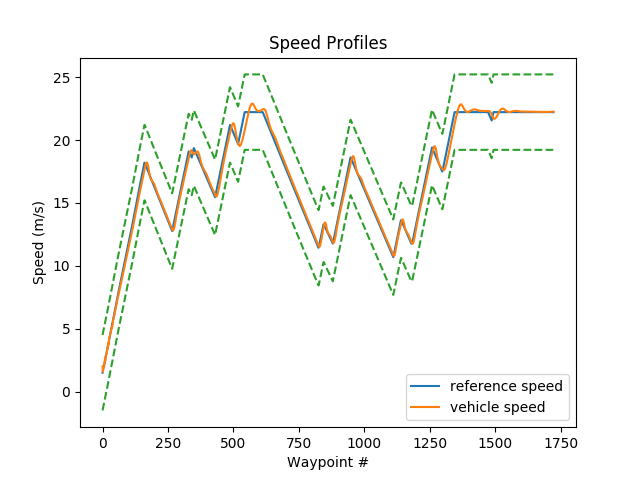
In the final project of the course, I have developed control code to navigate a self-driving car around a racetrack in the CARLA simulation environment. In this project I have constructed longitudinal and lateral dynamic models for a vehicle and created controllers that regulate speed and path tracking performance using Python.
The lateral control was implemented based on a famous Stanley algorithm and longitudinal control based on a PID control.