Autonomous pallet distribution in Amazon warehouse
In May 2019 I was selected to participate as an open-source contributor to the JdeRobot organization under the wonderful Google Summer of Code (GSoC) program! GSoC helped me to dive into the open-source development and spent a whole summer working on a great problems.
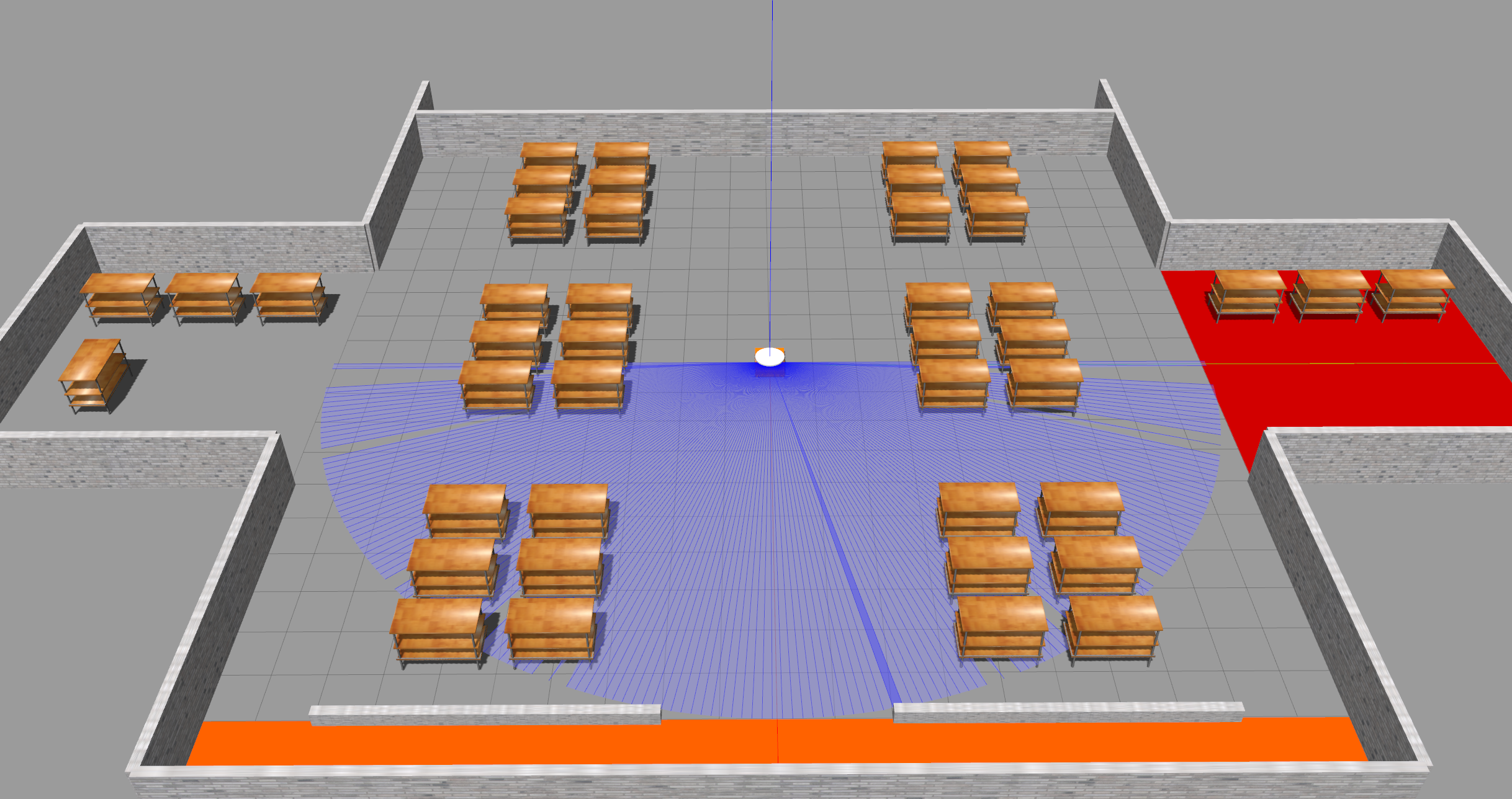
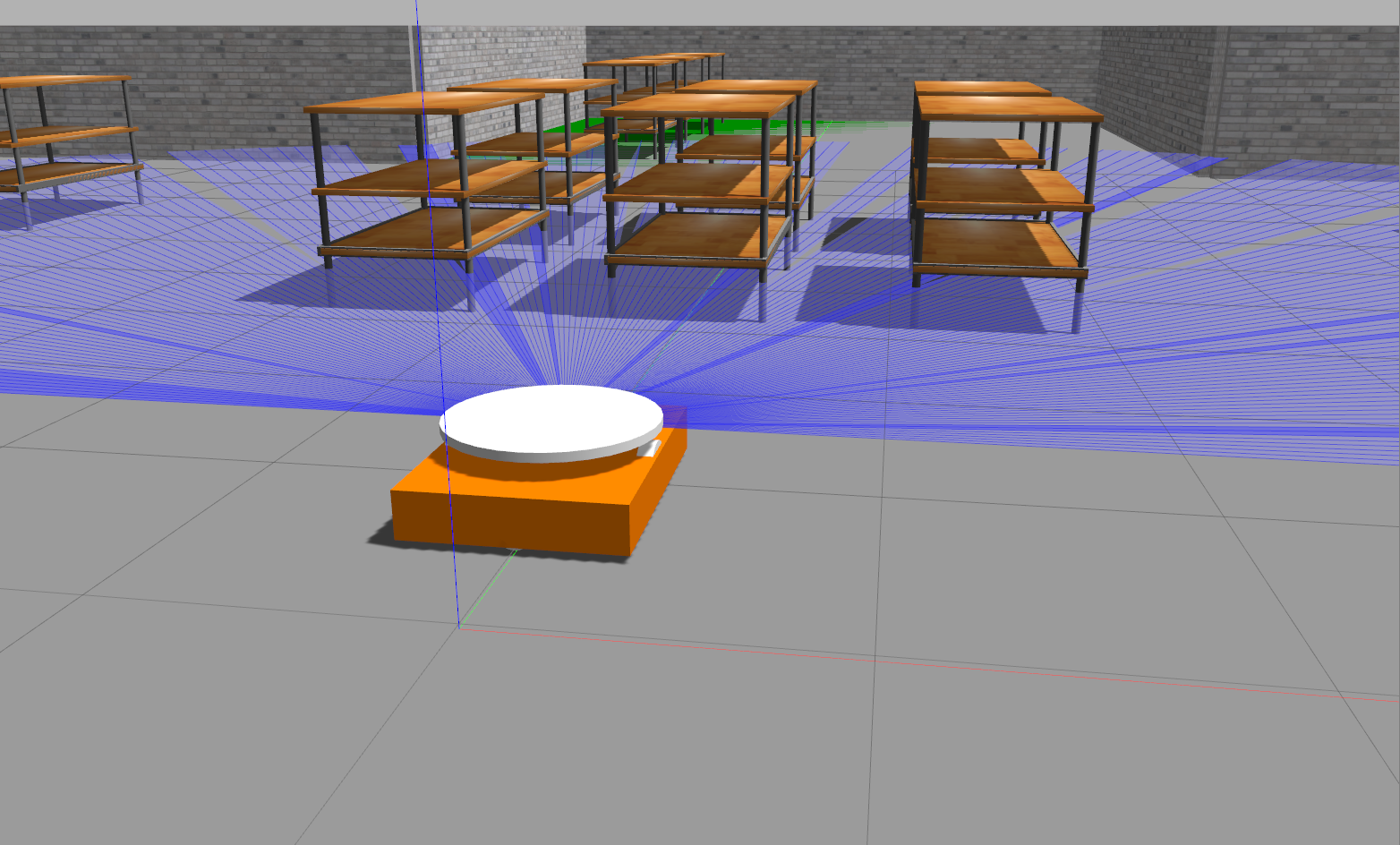
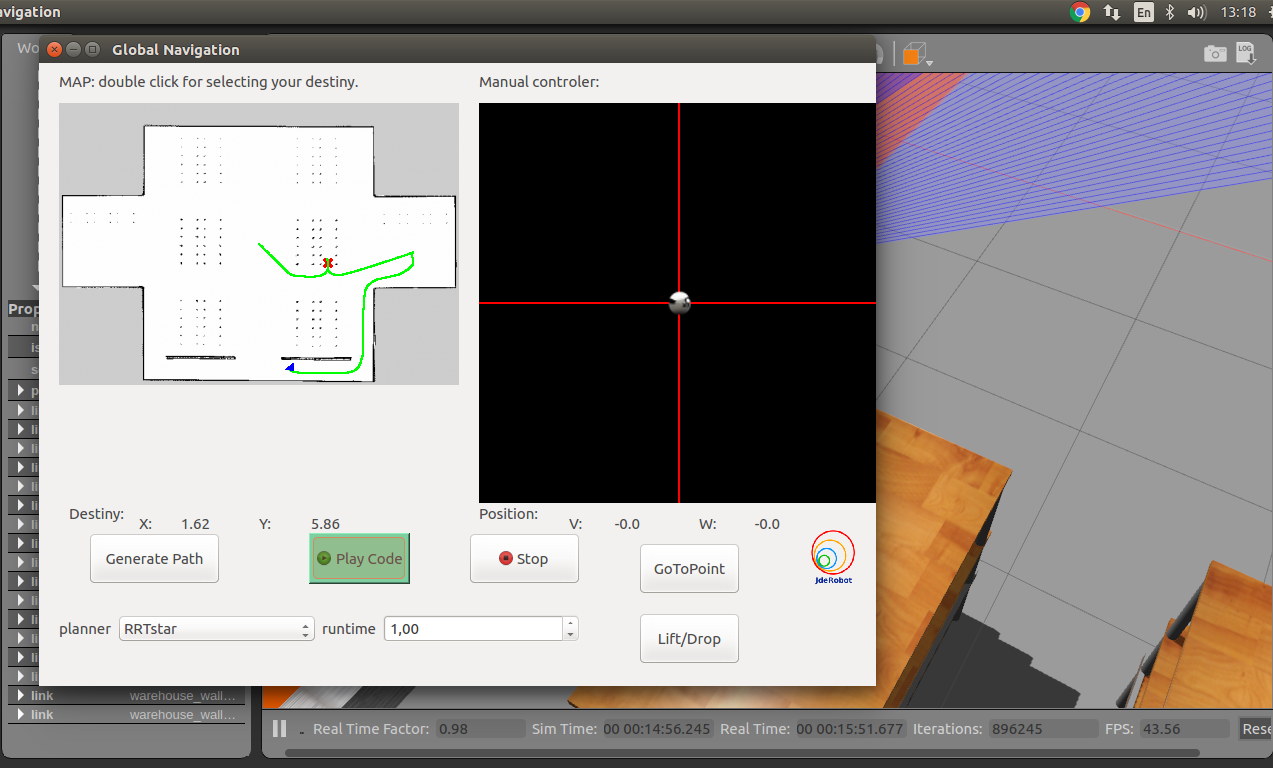
My task was to develop a robot that autonomously navigates, detects, picks and delivers the pallet with goods to the required position in simulation. The robot was simulated and operated in Gazebo through a ROS interface. Finally, by the end of summer I have successfully implemented the robot localization, mapping, navigation, global and local planner algorithms which were used for autonomous task completion of the robot. Additionally, I learned about SLAM algorithm and used it for map construction using LiDAR sensor and further integrated AMCL algorithm for real-time localization in the warehouse and developed a user-friendly GUI interface.
Autonomous pallet distribution algorithm is shown in video below:
More details about challenges I met on my way and the ways I approached them are discussed in my blog.
To proceed to the exercise review and completion please follow instructions in the JDERobot’s Robotics Academy documentation of the exercise.